Stavový popis systému
Stavový popis systému se používá pro systémy s více vstupy a výstupy, tzv. MIMO systémy. Používá se maticový zápis. Tento článek se zabývá stavovým popisem systému, který vzejde z linearizace typicky nelineárních diferenciálních rovnic v okolí takzvaného pracovního bodu, který bývá ekvilibriem. Poté stavový popis dobře popisuje chování systému jen v okolí tohoto pracovního bodu lineární aproximací, což se dá použít pro lineární řízení.
Pojmy
- Stav systému - Je to nejmenší počet stavových proměnných, určuje ho stavový vektor
- Stavový vektor - Jde o sloupcový vektor často značený , jehož složky tvoří stavové proměnné
- Stavové proměnné - Jde o časové funkce, které určují stav dynamického systému
- Stavový prostor - -rozměrný prostor reálných čísel
- Vektor vstupů - Jde o sloupcový vektor
- Vektor výstupů - Jde o sloupcový vektor
- Stavové rovnice - Určují vazbu mezi stavem a vstupy a výstupy systému. Jsou dvě, zde popsané jsou lineární, časově invariantní.
- Stavová trajektorie - Stav je vektor, jehož poloha se mění a na konci vytváří křivku





První stavová rovnice
Umožňuje vazbu derivace stavové proměnné na libovolný vstup nebo výstup. Rovnice je

Druhá stavová rovnice
Určuje vztah mezi vektorem výstupu a vektorem vstupu a vektorem stavu

Koeficienty rovnic
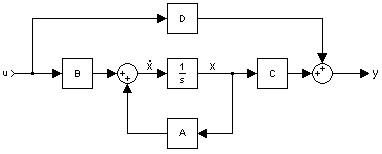
- - matice vnitřních vazeb systému (matice systému)
- - matice vazeb systému na vstup (matice řízení)
- - matice vazeb výstupu na stav
- - matice vazeb vstupu na výstup. Z hlediska dynamických vlastností je vliv zanedbatelný a považuje se často za nulový.




Určení matice přenosových funkcí ze stavového popisu
Jde o jednoznačný převod, v podstatě se jedná o řešení obou stavových rovnic po provedení Laplaceovy transformace. Matice , , a jsou známé. Matice je jednotková matice. Řešením je rovnice

- .

Výraz nazveme charakteristickým polynomem systému a kořeny tohoto polynomu nazveme póly systému. Poloha těchto pólů v komplexní rovině určuje stabilitu systému (leží-li alespoň jeden pól napravo od imaginární osy, je systém nestabilní).

Určení stavového popisu z jednorozměrných přenosů
Převod není jednoznačný používají se tři algoritmy
- Přímé programování
- Paralelní programování
- Sériové programování
Literatura
- I.Švarc, M.Šeda, M.Vítečková. Automatické řízení
- P.Blaha, P.Vavřín. Řízení a regulace 1. Skriptum VUT









