Matrix (wiskunde)
In de lineaire algebra, een deelgebied van de wiskunde, is een matrix, meervoud: matrices, een rechthoekig getallenschema. De gebruikelijke voorstelling van zo'n rechthoekig schema is met een zijde in de schrijfrichting en de andere loodrecht daarop, zodat de getallen daar in rijen en kolommen in geordend staan. De matrix is een middel om samenhangende gegevens en hun bewerkingen op een systematische en overzichtelijke wijze weer te geven. De naam matrix werd in 1848 ingevoerd door de Britse wiskundige J.J. Sylvester.
Indien er rijen en kolommen zijn, spreekt men van een -matrix. Het gebruik is dus dat het eerste cijfer de hoogte aangeeft en het tweede de breedte. Als is het een vierkante matrix. De getallen heten de elementen van de matrix. Een -matrix heeft dus elementen. Het element op het kruispunt van de -de rij en de -de kolom wordt aangeduid als het -de element en genoteerd als . Voor de matrix zelf noteert men wel: . Andere notaties worden ook gebruikt, onder andere, waarin het -de element van een matrix geschreven wordt als . Het volgende voorbeeld toont een 2×3-matrix met gehele getallen als elementen:












We zien bijvoorbeeld dat en .


Matrices zijn belangrijke instrumenten in de lineaire algebra. Men gebruikt ze onder andere om lineaire afbeeldingen mee weer te geven. Matrixvermenigvuldiging komt overeen met samenstelling van lineaire afbeeldingen. Matrices kunnen ook worden gebruikt om een overzicht te geven van de coëfficiënten in een stelsel van lineaire vergelijkingen. De determinant bepaalt voor een vierkante matrix voor een deel welke oplossingen het corresponderende stelsel van lineaire vergelijkingen heeft. De eigenwaarden en eigenvectoren van een matrix geven inzicht in de meetkunde van de geassocieerde lineaire transformatie.
Matrices worden in de wiskunde en in de toepassingen ervan veel gebruikt. In de natuurkunde maakt men op verscheidene gebieden gebruik van matrices, zoals bij de meetkundige optica en de matrixmechanica. De laatste toepassing heeft geleid tot een meer gedetailleerde studie van matrices met een oneindig aantal rijen en kolommen. De grafentheorie maakt gebruik van matrices om afstanden tussen paren knopen in een graaf bij te houden. Computergraphics gebruikt matrices om de driedimensionale ruimte op een tweedimensionaal vlak te projecteren. De matrixrekening generaliseert klassieke analytische begrippen zoals afgeleiden van functies en exponentiële functies naar matrices, wat toepassing vindt bij het oplossen van gewone differentiaalvergelijkingen. Het serialisme en de dodecafonie zijn 20e-eeuwse muzikale stromingen die gebruikmaken van een vierkante matrix om het patroon van de intervallen te bepalen.
Een belangrijke tak van de numerieke analyse is gewijd aan de ontwikkeling van efficiënte algoritmen voor matrixberekeningen, een onderwerp dat, hoewel al eeuwen oud, nog steeds een actief gebied van wiskundig onderzoek is. Methoden voor matrix-decompositie vereenvoudigen zowel theoretische als praktische berekeningen. Voor ijle matrices, dat wil zeggen matrices die naar verhouding veel nullen bevatten, kunnen specifiek ontworpen algoritmen tot versnelde berekeningen leiden. Dergelijke matrices spelen bijvoorbeeld een rol in de eindige-elementenmethode.
Geschiedenis
Men maakt bij het oplossen van lineaire vergelijkingen al heel lang gebruik van matrices. De Chinese tekst, de negen hoofdstukken van de wiskundige kunst, geschreven tussen 300 v.Chr. en 200 n.Chr., geeft het eerste voorbeeld van het gebruik van matrixmethoden om een stelsel van lineaire vergelijkingen op te lossen.[1]
De determinant werd bijna 100 jaar eerder in de Chinese wiskunde genoemd dan in 1683 door de Japanse wiskundige Seki en in 1693 door Leibniz. Cramer presenteerde zijn regel van Cramer in 1750.
De vroege matrixtheorie benadrukte determinanten sterker dan matrices. Een onafhankelijk matrixbegrip, dat verwant is aan de moderne notie van een matrix, ontstond pas in 1858, met het werk van Cayley's Memoir on the theory of matrices.[2][3] De naam matrix werd door Sylvester bedacht, die een matrix als opgebouwd achtte uit minoren, determinanten van kleinere matrices die uit het origineel ontstaan door het verwijderen van rijen en kolommen. Het woord matrix is etymologisch afkomstig uit het Latijn.[4]
De studie van determinanten kwam voort uit verschillende bronnen.[5] Problemen in de getaltheorie brachten Gauss er toe om coëfficiënten van kwadratische vormen, dat wil zeggen, uitdrukkingen zoals en lineaire afbeeldingen in drie dimensies met matrices in verband te brengen. Eisenstein heeft deze noties verder uitgewerkt, waaronder de opmerking dat de matrixvermenigvuldiging niet commutatief is. Cauchy was de eerste om algemene uitspraken over determinanten te bewijzen. Hij maakte daarbij gebruik van de volgende definitie van de determinant van een matrix : vervang de machten door in het polynoom





Hij toonde in 1829 ook aan dat de eigenwaarden van symmetrische matrices reëel zijn.[6] Jacobi bestudeerde functionele determinanten, later door Sylvester de Jacobiaan genoemd. Die kunnen bij integreren worden gebruikt bij het overgaan naar een ander coördinatenstelsel. Zie Kroneckers Vorlesungen über die Theorie der Determinanten[7] en Weierstrass' Zur Determinantentheorie,[8] beide in 1903 gepubliceerd. Zij waren de eersten die determinanten axiomatisch behandelden, dit in tegenstelling tot eerdere meer concrete benaderingen, zoals de genoemde stelling van Cauchy.
Veel stellingen werden aanvankelijk alleen voor kleine matrices vastgesteld, de stelling van Cayley-Hamilton werd bijvoorbeeld voor 2×2-matrices door Cayley in zijn hierboven genoemde werk bewezen, terwijl Hamilton deze stelling voor 4×4-matrices bewees. Frobenius bewees de stelling in 1898 voor alle matrices, toen hij aan bilineaire vormen werkte. Wilhelm Jordan was een van de eersten in Europa, aan het eind van de 19e eeuw, die een methode gaf om een stelsel van lineaire vergelijkingen op te lossen, nu bekend als de gauss-eliminatie. Matrices kregen in het begin van de 20e eeuw een centrale rol binnen de lineaire algebra.[9]
Het begin van de matrixmechanica door Heisenberg, Born en Jordan heeft geleid tot het bestuderen van matrices met oneindig veel rijen en kolommen.[10] Von Neumann heeft later de wiskundige formulering van de kwantummechanica opgesteld door de begrippen uit de functionaalanalyse verder te ontwikkelen, zoals lineaire afbeeldingen op hilbertruimten, die ruwweg gesproken corresponderen met de euclidische ruimte, maar met oneindig onafhankelijke richtingen.
Verschillend gebruik matrix in de geschiedenis van de wiskunde
Het woord matrix is door ten minste twee historisch belangrijke schrijvers op een ongewone manier gebruikt.
Russell en Whitehead gebruikten het woord matrix in hun Principia Mathematica (1910-1913) in de context van hun axioma van reduceerbaarheid. Zij stelden dit axioma voor als een middel om een functie successievelijk tot een van een lager type te reduceren, zodat de functie aan de 'onderkant', van de nulde orde, identiek zal zijn aan haar uitbreiding:
- "Laten we de naam matrix aan enige functie van een willekeurig aantal variabelen geven, waarbij geen sprake is van enige klaarblijkelijke variabelen. Dan wordt enige mogelijke functie anders dan een matrix door middel van veralgemening afgeleid van een matrix, dat wil zeggen door de propositie te beschouwen die beweert dat de functie in kwestie waar is voor alle mogelijke waarden of met sommige waarden van een van de argumenten, waarbij het andere argument of argumenten onbepaald blijven".[11]
Een functie van twee variabelen en kan bijvoorbeeld worden teruggebracht tot een verzameling van functies van een enkele variabele, bijvoorbeeld , door de functie voor alle mogelijke waarden van individuen te beschouwen, waar in de plaats van variabele wordt gesubstitueerd. Dan kan de resulterende collectie van functies van de enkele variabele , dat wil zeggen voor de verschillende worden gereduceerd tot een matrix van waarden door de functie te beschouwen voor alle mogelijke waarden van "individuen" gesubstitueerd in plaats van variabele :






- voor alle en


Tarski gebruikte het woord matrix in 1946 in zijn Introduction to Logic als een synoniem voor zijn notie van waarheidstabel, zoals deze wordt gebruikt in de wiskundige logica[12]
Definitie
Een -matrix over een lichaam of veld is een element van het cartesische product , geschreven als rijen onder elkaar van elementen van :




Daarbij moet een -matrix onderscheiden worden van het enige element .[13]



- Een -matrix is een element van , te onderscheiden van , dus een rij van 1-tupels met in elk een element van :




- Een -matrix is een element van , te onderscheiden van , dus een 1-tupel met als enig item een rij van elementen van :




De getallen heten de elementen van de matrix .

Het is gebruikelijk de componenten van de matrix als een kolom van rijen te schrijven:
- ,

wat leidt tot de matrix als een rechthoekig schema van getallen.
Het getallenlichaam waaruit de elementen van een matrix worden gekozen is meestal , zoals in een reële matrix, of , zoals in een complexe matrix.


Som
 Zie Matrixoptelling voor het hoofdartikel over dit onderwerp.
Zie Matrixoptelling voor het hoofdartikel over dit onderwerp.Twee matrices van dezelfde afmetingen kunnen bij elkaar worden opgeteld. Dat gebeurt elementsgewijs. De som van twee -matrices en heeft als elementen


- ,

dus

- Voorbeeld

Product
Het product van een -matrix met een -matrix of met een -vector kan door middel van matrixvermenigvuldiging worden berekend.


Product van matrices


Het product van een -matrix en een -matrix is een -matrix , met als elementen:

- .

- Voorbeeld

Matrixvermenigvuldiging is alleen gedefinieerd voor twee matrices waarvan het aantal kolommen van de eerste gelijk is aan het aantal rijen van de tweede.
Product van matrix en vector
Het product berekenen van een -matrix en een -vector gaat op dezelfde manier. Het is de -vector met coördinaten:


Dat is hetzelfde als de matrixvermenigvuldiging van de matrix en de kolomvector (matrix) met als elementen de coördinaten van de vector . Het resultaat is de kolomvector
![{\displaystyle x=[x_{1},\ldots ,x_{n}]^{\text{T}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52187c2ad416721e371689233cfc5c4f2b98faa5)
![{\displaystyle [(Ax)_{1},\ldots ,(Ax)_{m}]^{\text{T}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2ca6e627ec771e08e3f0eda79494a5ae6ecd8a8a)
met als elementen de coördinaten van de vector .
Rij- en kolomvector
Zie Rij- en kolomvector voor het hoofdartikel over dit onderwerp.Een -matrix is gedefinieerd als:
- ,

dus met als enige component de vector

Zo'n matrix, die als een rij getallen genoteerd wordt, lijkt erg veel op een vector en verschilt daar alleen in formele zin van. Men noemt een -matrix daarom wel een rijvector.
Een -matrix is gedefinieerd als:
- ,

dus met als -de component

Zo'n matrix, die als een kolom getallen genoteerd wordt, lijkt erg veel op een vector en verschilt daar alleen in formele zin van. Men noemt een -matrix daarom wel een kolomvector.
Vatten we de -vector op als de kolomvector , met elementen:

- ,

dan is het product , opgevat als kolomvector, hetzelfde als het matrixproduct .

Basisoperaties
Er zijn nog enkele operaties die op matrices kunnen worden toegepast en die de basistechnieken vormen voor het rekenen met matrices. Het gaat om scalaire vermenigvuldiging en transpositie. Voor het eventueel handmatig oplossen van lineaire vergelijkingen en het vinden van een inverse matrix komen daar nog de rij-operaties bij.
Scalaire vermenigvuldiging
Het product van de scalaire vermenigvuldiging van een matrix met het getal (in het spraakgebruik van de abstracte algebra een scalair genoemd) wordt berekend door elk element van met te vermenigvuldigen:



- Voorbeeld

Getransponeerde matrix
De getransponeerde van een -matrix is de -matrix , ook aangeduid met of , die men krijgt door de rijen en kolommen te verwisselen:





De getransponeerde van een getransponeerde matrix is weer de oorspronkelijke matrix:

- Voorbeeld

Rij-operaties
Het verwisselen van twee rijen. Als voorbeeld worden de rijen 1 en 2 omgewisseld.
- wordt


Het vermenigvuldigen van een rij met een getal dat niet nul is. Als voorbeeld wordt rij 1 vermenigvuldigd met 3.
- wordt

Het optellen van een veelvoud van een rij bij een andere rij. Als voorbeeld: rij 1 vermenigvuldigd met 3, en opgeteld bij rij 2.
- wordt

Vertrouwde eigenschappen van getallen breiden zich uit tot deze operaties op matrices: optelling is bijvoorbeeld commutatief, dat wil zeggen dat matrixoptelling niet afhankelijk is van de volgorde van de matrices:

Transpositie van een matrix is compatibel met optelling en scalaire vermenigvuldiging:

en

Toepassing van matrixoperaties
| A | producten | |||
|---|---|---|---|---|
| cement | kalk | gips | ||
| klanten | Bik | 14 | 9 | 3 |
| Mets | 2 | 11 | 15 | |
| Timp | 0 | 12 | 17 | |
| Voeg | 5 | 2 | 3 | |
Een bedrijf levert cement, kalk, gips in zakken van 25, 10 en 5 kg. Het bedrijf heeft 4 klanten: Bik, Mets, Timp en Voeg. De door deze klanten in een bepaald jaar afgenomen aantallen zakken laten zich overzichtelijk in een 4×3-matrix ordenen:

| B | producten | |||
|---|---|---|---|---|
| cement | kalk | gips | ||
| klanten | Bik | 17 | 10 | 4 |
| Mets | 3 | 7 | 8 | |
| Timp | 0 | 14 | 15 | |
| Voeg | 4 | 3 | 3 | |
Daaruit blijkt bijvoorbeeld dat , dus Timp heeft dat jaar 12 zakken kalk van 10 kg afgenomen.

De afgenomen aantallen van het volgende jaar staan in de matrix :

In dit jaar heeft Timp 14 zakken kalk van 10 kg gekocht.
Om te bepalen wat voor elke klant de totale afname van elk product is in deze twee jaren, moeten we de matrices elementsgewijs optellen. De zo ontstane matrix heet de som A+B van de beide matrices:

| W | prijzen en gewichten | ||
|---|---|---|---|
| € | kg | ||
| producten | cement | 12,00 | 25 |
| kalk | 9,00 | 10 | |
| gips | 8,00 | 5 | |
De prijs van een zak cement is €12, van een zak kalk €9 en van een zak gips €8. In de 3×2-matrix staan de prijzen en gewichten van de drie producten:


Het totale bedrag dat Bik in het eerste jaar heeft besteed, volgt uit:
- ,

waarin de getallen van de eerste rij van A (Bik) en de eerste kolom van W (prijzen) te zien zijn.
Het totale gewicht van de door Bik gekochte producten wordt op soortgelijke manier berekenend:
- ,

waarin nu de getallen van de eerste rij van A (Bik) en de tweede kolom van W (gewichten) staan.
Ook voor de andere klanten kunnen zulke berekeningen gemaakt worden. Samen heten ze matrixvermenigvuldiging en geven ze een matrix die het product van en heet:


Lineaire vergelijkingen en transformaties
Lineaire vergelijkingen
Zie Lineaire vergelijking en Stelsel van lineaire vergelijkingen voor de hoofdartikelen over dit onderwerp.Een bijzonder geval van matrixvermenigvuldiging is nauw verbonden met lineaire vergelijkingen: als een kolomvector (dat wil zeggen een -matrix) van variabelen voorstelt en een -matrix is, dan is de matrixvergelijking



waarin een willekeurige -kolomvector is, equivalent aan het stelsel lineaire vergelijkingen





Op deze manier kunnen matrices worden gebruikt om stelsels van lineaire vergelijkingen op een compacte wijze te noteren, te manipuleren en op te lossen.
Lineaire afbeeldingen
Matrices en matrixvermenigvuldiging zijn direct gerelateerd aan lineaire afbeeldingen en samenstellingen daarvan. Bij gebruik van kolomvectoren representeert een reële -matrix een lineaire afbeelding

die elke vector afbeeldt op het (matrix)product , een vector in .


Omgekeerd bepaalt de lineaire afbeelding de -matrix met als -de kolom, opgevat als vector, het beeld van de -de eenheidsvector . Dit kan worden genoteerd als:





De matrix bepaalt op zijn beurt weer de afbeelding , immers:


Van de matrix zegt men dat hij de lineaire afbeelding representeert. noemt men de matrix van .
De onderstaande tabel toont een aantal reële 2×2-matrices met de bijbehorende lineaire transformaties van . Het blauwe origineel wordt afgebeeld op het groene rooster en de groene vormen, de oorsprong (0,0) wordt gemarkeerd met een zwart punt.

| Horizontale afschuiving met m=1.25. | Horizontale spiegeling | Samendrukking met | Opschalen met een factor 3/2 | Draaiing over π/6 = 30° |
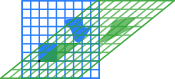 | 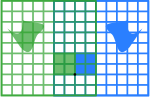 |  | 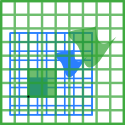 | 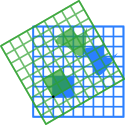 |






In de relatie tussen matrices en lineaire afbeeldingen correspondeert matrixvermenigvuldiging met samenstelling van afbeeldingen.[16] Als de -matrix behoort bij de lineaire afbeelding en de -matrix bij de lineaire afbeelding , dan behoort bij de samenstelling het product van de matrices en . Immers:






De laatste gelijkheid volgt uit de hierboven genoemde associativiteit van de matrixvermenigvuldiging.
Vierkante matrices
Zie vierkante matrix voor het hoofdartikel over dit onderwerp.Een speciaal type matrix is de vierkante matrix, een matrix met evenveel rijen als kolommen. Als het aantal rijen en kolommen is, wordt de -matrix een vierkante matrix van de orde genoemd. Een vierkante matrix van de orde representeert een transformatie van een -dimensionale ruimte, reden waarom vierkante matrices een belangrijke rol spelen in de lineaire algebra.

Voor vierkante matrices zijn de begrippen hoofddiagonaal, spoor en determinant gedefinieerd.
Hoofddiagonaal
Zie hoofddiagonaal voor het hoofdartikel over dit onderwerp.De elementen van de vierkante matrix vormen de hoofddiagonaal van .


In relatie met de hoofddiagonaal worden speciale type vierkante matrices onderscheiden.
Diagonaalmatrix, driehoeksmatrices
Als alle elementen buiten de hoofddiagonaal van de vierkante matrix gelijk aan nul zijn, wordt een diagonaalmatrix genoemd. Als alleen alle elementen boven (onder) de hoofddiagonaal nul zijn, wordt een beneden- respectievelijk een bovendriehoeksmatrix genoemd.
Als bijvoorbeeld gelijk is aan 3, zien deze matrices er als volgt uit
- (diagonaal), (beneden-) en (bovendriehoeksmatrix).



Spoor
Zie Spoor (lineaire algebra) voor het hoofdartikel over dit onderwerp.Het spoor van een vierkante matrix , genoteerd als , is de som van haar diagonaalelementen. Terwijl, zoals boven vermeld, matrixvermenigvuldiging niet commutatief is, is het spoor van het product van twee matrices onafhankelijk van de volgorde van de factoren: .[17]


Determinant
Zie Determinant voor het hoofdartikel over dit onderwerp.De determinant , of , van een vierkante matrix is een functie van de elementen van die matrix. Bepaalde eigenschappen van de matrix kunnen afgelezen worden aan de determinant. Zo is een matrix dan en slechts dan inverteerbaar als zijn determinant ongelijk is aan nul, en is de absolute waarde van de determinant gelijk aan de oppervlakte (in de ) of het volume (in de ) van het beeld van het eenheidsvierkant (of de eenheidskubus), terwijl het teken correspondeert met de oriëntatie van de corresponderende lineaire afbeelding: de determinant is dan en slechts dan positief als de oriëntatie behouden blijft.



Eigenwaarden en eigenvectoren
Zie Eigenwaarde (wiskunde) voor het hoofdartikel over dit onderwerp.Een vierkante matrix correspondeert met een lineaire transformatie van een vectorruimte. Een lijn door de oorsprong wordt soms door deze transformatie afgebeeld op zichzelf. Wel is het beeld van een punt op de lijn meestal niet het punt zelf, maar een ander punt. De vectoren op de lijn, die op zichzelf wordt afgebeeld, heten eigenvectoren van de matrix, en van de transformatie, en het getal dat het veelvoud bepaalt, heet de eigenwaarde. Om precies te zijn: een getal λ en een vector worden eigenwaarde en eigenvector van de vierkante matrix genoemd.[nb 1][18] als geldt:


Deze relatie kan ook worden geschreven als:
- ,

wat betekent dat voor een eigenwaarde λ geldt:

De eigenwaarden zijn dus de wortels van het polynoom
- ,

die het karakteristieke polynoom van wordt genoemd.
Symmetrie
Zie Symmetrische matrix voor het hoofdartikel over dit onderwerp.Een vierkante matrix , die gelijk is aan haar getransponeerde matrix, wat wil zeggen dat
- ,

is een symmetrische matrix.
Als zij gelijk is aan het negatieve van haar getransponeerde, wat wil zeggen dat
- ,

is het een scheefsymmetrische matrix.
Bij complexe matrices wordt het begrip symmetrie vaak vervangen door het begrip Hermitische matrices, die voldoen aan
- ,

waarin de ster de complex geadjugeerde van de matrix aangeeft, dat wil zeggen de getransponeerde van de complex geconjugeerde van .
Door de spectraalstelling hebben reële symmetrische matrices en complexe Hermitische matrices een basis van eigenvectoren. In beide gevallen zijn alle eigenwaarden reëel[19] Deze stelling kan voor matrices met oneindig veel rijen en kolommen worden veralgemeend naar oneindig dimensionale situaties. zie hieronder.
Definietheid
Zie definietheid voor het hoofdartikel over dit onderwerp.Een reële symmetrische -matrix wordt definiet genoemd, als de reële kwadratische vorm

die door de matrix wordt voortgebracht, voor elke vector hetzelfde teken heeft. Is dat teken positief, dan heet de vorm positief-definiet, is het negatief, dan negatief-definiet.[20]

Orthogonale matrix
Zie orthogonale matrix voor het hoofdartikel over dit onderwerp.Een reële vierkante matrix heet orthogonaal, als de rijen en ook de kolommen een orthonormaal stelsel vormen. Dit houdt in dat:
- ,

waarin de eenheidsmatrix is. Hieraan is te zien dat inverteerbaar is met inverse matrix

- .

De determinant van een orthogonale matrix is +1 of −1. De waarde +1 hoort bij een matrix die een draaiing voorstelt en de waarde −1 bij een matrix die een draaispiegeling representeert. F"matr
Berekenbaarheid
Behalve de theoretische kennis van de eigenschappen van matrices en hun relaties tot andere deelgebieden van de wiskunde, is het om praktische doeleinden belangrijk om matrixberekeningen doeltreffend en nauwkeurig uit te voeren. Het domein binnen de wiskunde dat deze zaken bestudeert, wordt de numerieke lineaire algebra[21] genoemd. Zoals ook in andere numerieke onderzoeksgebieden zijn de twee belangrijkste aspecten de complexiteit van algoritmen en de numerieke stabiliteit. Veel problemen kunnen worden opgelost door zowel directe algoritmen als iteratieve benaderingen. Zo kunnen eigenvectoren worden berekend door het vinden van een rij vectoren die convergeert naar een eigenvector, als naar oneindig gaat.[22]

Matrixdecompositiemethoden
Zie Matrixdecompositie, Diagonaliseerbare matrix en Gauss-eliminatie voor de hoofdartikelen over dit onderwerp.Er zijn verschillende methoden om matrices in een voor berekeningen meer toegankelijke vorm om te zetten. Aan deze methoden wordt in het algemeen gerefereerd als matrixtransformatie of matrixdecompositie technieken. Het belang van al deze decompositietechnieken is dat zij bepaalde eigenschappen van de matrices in kwestie bewaren, zoals de determinant, de rang of de inverse, zodat deze grootheden na toepassing van de transformatie kunnen worden berekend, of dat bepaalde matrixoperaties voor sommige typen van matrices algoritmisch gemakkelijker kunnen worden uitgevoerd.
Abstracte algebraïsche aspecten
Matrices kunnen op verschillende manieren worden veralgemeend. De abstracte algebra gebruikt matrices met elementen die niet uit getallen, maar uit de meer algemene lichamen (Ned) / velden (Be) of zelfs ringen bestaan, terwijl de lineaire algebra eigenschappen van matrices in de notie van lineaire afbeeldingen codificeert. Het is ook mogelijk om matrices met oneindig veel kolommen en rijen in beschouwing te nemen. Een andere uitbreiding vormen de zogenaamde tensoren, die als hoger-dimensionale arrays van getallen gezien kunnen worden, dit in tegenstelling tot vectoren, die vaak als rijen van getallen (eendimensionale vectoren) kunnen worden gerealiseerd, terwijl matrices rechthoekige of tweedimensionale arrays van getallen zijn.[23] Matrices kunnen onder bepaalde voorwaarden een groep vormen. Deze staan bekend als matrixgroepen.
Relaties met lineaire afbeeldingen
Lineaire afbeeldingen zijn equivalent aan -matrices, zoals hierboven beschreven. Meer in het algemeen kan elke lineaire afbeelding tussen eindigdimensionale vectorruimten, na de keuze van de bases van , en van , worden beschreven door de matrix , die zodanig is dat





- .

Met andere woorden de -de kolom van drukt het beeld van de -de basisvector uit in termen van de basisvectoren van . Deze relatie bepaalt dus op unieke wijze de elementen van de matrix . Merk op dat de matrix afhankelijk is van de keuze van de bases: verschillende keuzes van de bases geven aanleiding tot verschillende, maar wel equivalente matrices.[24] Veel van de bovengenoemde begrippen kunnen in dit licht worden geherinterpreteerd; de getransponeerde matrix beschrijft bijvoorbeeld de getransponeerde van een lineaire afbeelding gegeven door , met betrekking tot de duale basissen.[25]





Domein van de elementen
Wanneer met matrices wordt gerekend, moet zijn bepaald uit welke verzameling de elementen in de matrix komen. Dat kunnen de reële , de complexe of de rationale getallen zijn. Een eindig lichaam/veld kan ook worden gekozen, dat gebeurt in de coderingstheorie. Het lichaam waaruit de elementen worden gekozen, moet gesloten zijn.

Als het alleen nodig is twee matrices bij elkaar op te tellen of met elkaar te vermenigvuldigen, is het een voldoende eis dat de elementen uit een ring komen. Als van een vierkant matrix ook de inverse moet kunnen worden bepaald, moeten de matrices over een lichaam zijn gedefinieerd.
Matrixgroepen
Zie Matrixgroep voor het hoofdartikel over dit onderwerp.Een groep is een wiskundige structuur die uit een verzameling van objecten bestaat samen met een binaire operatie, dat wil zeggen een operatie die elke twee objecten onder bepaalde eisen tot een derde combineert. Een groep waarin de objecten matrices zijn en de groepsoperatie matrixvermenigvuldiging, noemt men een matrixgroep.[nb 2][26] Aangezien in een groep elk element inverteerbaar is, zijn de meest algemene matrixgroepen de groepen van alle inverteerbare matrices van een bepaalde orde, de zogenaamde algemene lineaire groepen.
Elke eigenschap van matrices die onder matrixproducten en inverses wordt bewaard, kan worden gebruikt om verdere matrixgroepen te definiëren. Matrices met een bepaalde omvang en met een determinant 1 vormen bijvoorbeeld een deelgroep van hun algemene lineaire groep. Deze kleinere deelgroep van een algemene lineaire groep wordt een speciale lineaire groep[27] genoemd. Orthogonale matrices, bepaald door de voorwaarde

vormen de orthogonale groep.[28] Men noemt ze orthogonaal, aangezien de geassocieerde lineaire transformaties van hoeken bewaren in de zin dat het scalair product van twee vectoren onveranderd blijft onder toepassing van op hen:


- .[29]

Elke eindige groep is isomorf met een matrixgroep, zoals men kan zien door de regelmatige voorstelling van de symmetrische groep[30] te beschouwen. Algemene groepen kunnen worden bestudeerd door gebruik te maken van matrixgroepen, die relatief goed worden begrepen door middel van de representatietheorie.[31]
Oneindige matrices
Het is ook mogelijk om matrices met oneindig veel rijen en/of kolommen te beschouwen[32] ook al kan men een oneindig aantal objecten, uit de aard van de zaak, niet expliciet als een matrix opschrijven. Het enige dat telt, is dat voor elk element uit de verzameling die de rijen indiceert, en elk element uit de verzameling die de kolommen indiceert, er een goed gedefinieerd element bestaat (de indexverzamelingen hoeven geen deelverzamelingen van de natuurlijke getallen te zijn). De belangrijkste operaties van optellen, aftrekken, scalaire vermenigvuldiging en transpositie kunnen probleemloos gedefinieerd worden, maar matrixvermenigvuldiging kan oneindige sommaties vereisen om de resulterende elementen te definiëren, en deze zijn in het algemeen niet gedefinieerd.
Als oneindige matrices worden gebruikt om lineaire afbeeldingen te beschrijven, kunnen alleen die matrices worden gebruikt waarvan alle kolommen een eindig aantal elementen ongelijk aan 0 hebben. Wil een matrix een lineaire afbeelding beschrijven, dan moeten er in beide ruimten een basis worden gekozen. Dit betekent dat elke vector in de ruimte uniek geschreven kan worden als een eindige lineaire combinatie van basisvectoren. Nu beschrijven de kolommen van de beelden onder ' van individuele basisvectoren van uitgedrukt in de basis van wat alleen zinvol is als deze kolommen slechts een eindig aantal elementen ongelijk aan 0 hebben. Er bestaat echter geen beperking op de rijen van in het product zijn er slechts een eindig aantal niet-nulzijnde coëfficiënten van betrokken, zodat elk van zijn elementen, zelfs als deze worden gegeven als een oneindige som van de producten, slechts eindig veel termen ongelijk aan 0 betreffen en daarom goed zijn gedefinieerd. Bovendien komt dit neer op de vorming van een lineaire combinatie van de kolommen van die effectief slechts een eindig aantal van hen betreft, vandaar dat het resultaat slechts een eindig aantal elementen ongelijk aan 0 heeft, omdat elk van deze kolommen slechts een eindig aantal elementen ongelijk aan 0 heeft. Men ziet ook dat producten van twee goedgedefinieerde matrices van het gegeven type weer van hetzelfde type zijn (op voorwaarde dat zoals gewoonlijk de kolom- en rij-indexverzamelingen overeenkomen) en overeenkomen met de samenstelling van lineaire afbeeldingen.




Oneindige matrices kunnen ook worden gebruikt om operatoren op Hilbert-ruimten te beschrijven. Hier komen convergentie- en continuïteitsvragen naar voren, die opnieuw resulteren in een aantal beperkingen, die moeten worden opgelegd.[nb 3] en in plaats daarvan worden de abstracte en krachtiger instrumenten uit de functionaalanalyse gebruikt.
Lege matrix
Een lege matrix is een matrix, waarin het aantal rijen of het aantal kolommen (of beide) nul is.[33][34] Een lege matrix heeft geen elementen, maar heeft wel een duidelijk omschreven aantal rijen en kolommen, die nodig zijn voor bijvoorbeeld de definitie van het matrixproduct. Dus als een 3×0-matrix is en een 0×3-matrix, dan is de 3×3-matrix (die overeenkomt met de nulafbeelding van een driedimensionale ruimte op zichzelf die wordt verkregen als de samenstelling van de unieke afbeelding van op een nuldimensionale ruimte gevolgd door de nulafbeelding van terug op ), terwijl de 0×0-matrix is (overeenkomend met de unieke afbeelding van op zichzelf die wordt verkregen als de samenstelling ). Er is geen gemeenschappelijke notatie voor lege matrices, maar in de meeste computeralgebrasystemen kan men lege matrices definiëren en kan men ermee rekenen. Merk op dat de determinant van de 0×0-matrix 1 is (en niet 0, wat op het eerste gezicht meer voor de hand zou liggen): de Leibniz-formule geeft deze waarde als een som over de unieke permutatie van de lege verzameling, met een leeg product als de term; de Laplace-expansie voor een 1×1-matrix maakt duidelijk dat de waarde van de 0×0-minor als 1 moet worden genomen. Deze waarde is ook consistent met het feit dat de identiteitsafbeelding van enige eindigdimensionale ruimte op zichzelf determinant 1 heeft, een feit dat vaak gebruikt wordt als onderdeel van de karakterisering van determinanten.




Transformaties
Zie Lineaire transformatie voor het hoofdartikel over dit onderwerp.Matrices worden veel gebruikt bij berekeningen voor bijvoorbeeld het draaien, schalen en transleren van vormen in 2 of 3 dimensies. Draaien en schalen zijn lineaire operaties en kunnen dus direct door een matrix voorgesteld worden. Aangezien een translatie een affiene afbeelding is, dus niet lineair, maakt men voor een translatie gebruik van een extra dimensie door de betrokken vectoren voor te stellen met homogene coördinaten. De vormen, die bestaan uit een verzameling punten, vectoren, worden getransformeerd.
Toepassingen
Er zijn talrijke toepassingen van matrices, zowel in de wiskunde als andere wetenschappen. Sommigen daarvan maken alleen gebruik van de compacte weergave van een verzameling getallen in een matrix. In de speltheorie en de economie codeert een matrix voor de uitbetaling voor twee spelers, afhankelijk van welke alternatieven deze spelers uit een gegeven (eindige) verzameling van alternatieven hebben gekozen.[35] Text mining en geautomatiseerde thesauruscompilatie maakt gebruik van documenttermenmatrices, zoals TF-IDF om de frequentie van bepaalde woorden in verschillende documenten bij te houden.[36]
Complexe getallen kunnen voorgesteld worden door een specifieke reële 2×2-matrix
- ,

waarbij optelling en vermenigvuldig van complexe getallen en matrices met elkaar corresponderen. 2×2-rotatiematrices bijvoorbeeld representeren de vermenigvuldiging met een complex getal van absolute waarde 1, zoals hierboven beschreven. Een soortgelijke interpretatie is mogelijk voor quaternionen.[37]
Symmetrieën en transformaties in de natuurkunde
Zie Symmetrie (natuurkunde) voor het hoofdartikel over dit onderwerp.Lineaire transformaties en de bijbehorende symmetrieën spelen een belangrijke rol in de moderne natuurkunde. Elementaire deeltjes in de kwantumveldentheorie worden bijvoorbeeld geclassificeerd als representaties van de Lorentz-groep van de speciale relativiteitstheorie, en meer specifiek door hun gedrag onder de spingroep. Concrete representaties, waarbij de Pauli-matrices en meer in het algemene gamma-matrices een integraal onderdeel van de natuurkundige beschrijving vormen van fermionen, die zich als spinoren[38] gedragen. Voor de drie lichtste quarks bestaat er een groepstheoretische representatie, waarbij de speciale unitaire groep SU(3); voor hun berekeningen, gebruiken natuurkundigen een handige matrixrepresentatie, die bekend als Gell-Mann-matrices, die ook voor de SU(3) ijkgroep wordt gebruikt en die de basis vormen van de moderne beschrijving van de sterke nucleaire interacties, kwantumchromodynamica. De Cabibbo-Kobayashi-Maskawa-matrix drukt op zijn beurt uit dat de fundamentele quarktoestanden, die belangrijk zijn voor zwakke interacties, niet hetzelfde zijn als, maar wel lineair gerelateerd zijn aan, de fundamentele quarktoestanden die deeltjes met specifieke en verschillende massa's definiëren.[39]
Lineaire combinaties van kwantumtoestanden
Het eerste model van de kwantummechanica ( Heisenberg, 1925) representeerde de operatoren van de theorie door oneindigdimensionale matrices die inwerkten op kwantumtoestanden.[40] Dit eerste model staat ook bekend als de matrixmechanica. Een bijzonder voorbeeld is de dichtheidsmatrix, die de "gemengde" toestand van een kwantumsysteem als een lineaire combinatie van elementaire, "zuivere" eigentoestanden karakteriseert.[41]
Een andere matrix dient als een belangrijk instrument voor het beschrijven van de verstrooiingsexperimenten, die de hoeksteen vormen van de experimentele deeltjesfysica: botsingreacties, zoals deze plaatsvinden in deeltjesversnellers, waar niet-interagerende deeltjes op elkaar af stormen en vervolgens in een kleine interactiezone op elkaar botsen, met als resultaat een verzameling van niet-interagerende deeltjes, kunnen worden omschreven als het scalair product van uitgaande deeltjestoestanden en een lineaire combinatie van inkomende deeltjestoestanden. De lineaire combinatie wordt gegeven door een matrix, die bekendstaat als de S-matrix. Deze S-matrix codeert voor alle informatie over de mogelijke interacties tussen deeltjes.[42]
Meetkundige optica
De meetkundige optica kent ook matrixtoepassingen. In deze benaderingswijze wordt het golfkarakter van het licht buiten beschouwing gelaten. Het resultaat is een model waarin lichtstralen inderdaad meetkundige stralen zijn. Als de lichtstralen kleine hoeken maken met de optische as (de zgn. paraxiale benadering), kan men voor dunne lenzen volstaan met de eenvoudige lenzenformule. Is de lens dikker, of heeft men een lenzenstelsel, dan kan de werking van een brekend of reflecterend oppervlak op een gegeven lichtstraal worden beschreven met een vermenigvuldiging van een tweedimensionale vector met een 2×2-matrix: de componenten van de vector zijn de hellingshoek van de lichtstraal en de afstand tot de optische as, terwijl de matrix de breking of reflectie beschrijft. Deze matrix wordt de brekingsmatrix genoemd (reflectie is een bijzonder geval van breking, met brekingsindex = −1). Daarnaast gebruikt men een translatiematrix voor de verplaatsing van het referentievlak naar een volgend brekend of refecterend oppervlak, dat weer zijn eigen brekingsmatrix heeft. Het optische systeem, dat uit een combinatie van lenzen en/of reflecterende elementen bestaat, wordt nu simpelweg gekarakteriseerd door de productmatrix van de achtereenvolgende brekings- en translatiematrices.[43][44]
Elektronica: vierpoolmodel
In de analyse van lineaire elektrische en elektronische netwerken wordt het gedrag van veel elektronische componenten beschreven met het vierpoolmodel, of ook het tweepoortmodel genoemd. Daarin worden de ingangsspanning en -stroom als een kolomvector beschouwd, en de uitgangsspanning en -stroom als een kolomvector . Dit levert een matrixvergelijking , waarin een 2×2-matrix is met één impedantie-element , één admittantie-element en twee dimensieloze elementen en . Het doorrekenen van schakelingen komt dan neer op het vermenigvuldigen van matrices.[45]








Berekenen van het aantal n-stapswegen
Een veelvoorkomend wiskundig vraagstuk is het berekenen op hoeveel manieren men van punt A naar punt D kan gaan, waarbij opeenvolgende verbindingen worden gebruikt. Hierbij wordt vertrokken van een vierkante matrix waarin per rij, per kolom het aantal directe verbindingen opgegeven is.
- Bij de figuur hoort

Door de matrix hierna tot de macht te verheffen, komen we op een nieuwe matrix uit die het aantal manieren voorstelt waarop men via opvolgende verbindingen van punt A naar punt D kan gaan. Ook -stapswegen tussen andere punten kunnen hieruit afgelezen worden.
Voorbeeld: op hoeveel manieren kan men van A naar D gaan in 5 stappen?

Conclusie: om in 5 stappen van A naar D te gaan, zijn er 24 mogelijkheden (zie element ).

Om in 5 stappen van B naar C te gaan, zijn er 4 mogelijkheden (zie element ).

Typen matrices
Men onderscheidt de volgende typen matrices:
Op basis van de vorm
- vierkante matrix: matrix met evenveel rijen als kolommen
- diagonaalmatrix: vierkante matrix waarvan de elementen buiten de hoofddiagonaal 0 zijn
- eenheidsmatrix: diagonaalmatrix met alle elementen op de hoofdiagonaal gelijk aan 1
- benedendriehoeksmatrix: vierkante matrix waarvan alle elementen boven de hoofddiagonaal 0 zijn
- bovendriehoeksmatrix: vierkante matrix waarvan alle elementen onder de hoofddiagonaal 0 zijn
- hessenbergmatrix: vierkante matrix waarvan alle elementen onder de eerste benedendiagonaal of alle elementen boven de eerste bovendiagonaal 0 zijn
- tridiagonale matrix: vierkante matrix waarvan alle elementen onder de eerste benedendiagonaal en alle elementen boven de eerste bovendiagonaal 0 zijn
Op basis van de opvulling van de elementen
- symmetrische matrix: vierkante matrix waarin de elementen gespiegeld zijn rond de hoofddiagonaal
- antisymmetrische matrix: vierkante matrix waarvan de gespiegelde elementen tegengesteld zijn aan elkaar
- hermitische matrix: complexe matrix waarvan de getransponeerde gelijk is aan de complex toegevoegde matrix
- ijle (of schaarse of dunbezette) matrix: matrix waarin het merendeel van de elementen de waarde 0 hebben
- nulmatrix: matrix waarvan alle elementen 0 zijn
Op basis van eigenschappen
- orthogonale matrix: matrix met orthonormale kolommen, dus ook orthonormale rijen
- unitaire matrix: complexe matrix met orthonormale kolommen, dus ook orthonormale rijen
- normale matrix: complexe matrix die commuteert met zijn hermitisch toegevoegde matrix
- singuliere matrix: vierkante matrix met determinant nul
- websites
- D Klingens. Matrices.
- voetnoten
- ↑ 'Eigen' betekent zowel in het Nederlands als in het Duits eigen.
- ↑ Men vereist verder nog dat de groep gesloten is in de algemene lineaire groep.
- ↑ "Niet veel van de matrixtheorie is overdraagbaar naar oneindigdimensionale ruimten, en dat deel, waar dit wel voor geldt, is niet zo nuttig, maar helpt soms een beetje." Halmos, 1982 pag. 23, hoofdstuk 5
- meer voetnoten
- ↑ Shen, Crossley, Lun, 1999 geciteerd door Bretscher, 2005 pag.
- ↑ Cayley, 1889, vol. II, blz. 475-496))
- ↑ Dieudonne,1978, Vol. 1, Ch. III, blz. 96
- ↑ Merriam-Webster woordenboek. Gearchiveerd op 10 mei 2023.
- ↑ Knobloch, 1994
- ↑ Hawkins, 1975
- ↑ Kronecker, Hensel, 1897
- ↑ Weierstrass, 1915, vol 3, blz. 271-286
- ↑ Bocher
- ↑ Mehra, Rechenberg, 1987
- ↑ Alfred North Whitehead en Bertrand Russell (1913) Principia Mathematica to * 56, Cambridge at the University Press, Cambridge UK (heruitgegeven 1962) zie pagina 162ff.
- ↑ Tarski, Alfred, 1946 Introduction to Logic and the Methodology of Deductive Sciences (Inleiding in de logica en de methodologie van de deductieve wetenschappen, Dover Publications, Inc, New York NY, ISBN 0-486-28462-X.
- ↑ Dit is in anders dan in herhaald cartesisch product, waar een 1-tupel wordt geïdentificeerd met de enige component waaruit het bestaat.
- ↑ Brown, 1991, Stelling I.2.6.
- ↑ Brown, 1991, I.2.21 en 22
- ↑ Greub, 1975, deel III.2
- ↑ Dit volgt onmiddellijk uit de definitie van matrixvermenigvuldiging.
- ↑ Brown, 1991, Definitie III.4.1.
- ↑ Horn, Johnson, 1985, Stelling 2.5.6.
- ↑ Horn, Johnson, 1985, Hoofdstuk 7.
- ↑ Bau III, Trefethen, 1997.
- ↑ Householder, 1975, Ch. 7.
- ↑ Coburn, 1955, Ch. V.
- ↑ Greub, 1975, deel III.3.
- ↑ Greub, 1975, Sectie III.3.13.
- ↑ Baker, 2003, Def. 1,30
- ↑ Baker, 2003, Stelling 1.2
- ↑ Artin, 1991, hoofdstuk 4.5.
- ↑ Artin, 1991, Stelling 4.5.13.
- ↑ Rowen, 2008, Voorbeeld 19.2, pag. 198.
- ↑ Zie elke verwijzing in de representatietheorie of groepsrepresentatie.
- ↑ Zie het item "Matrix" in Itõ, 1987.
- ↑ "Lege matrix: een matrix is leeg, indien haar rij- of haar kolomdimensie nul is", Glossarium, O-Matrix v6 User Guide
- ↑ "Een matrix met ten minste één dimensie gelijk aan nul, wordt een lege matrix genoemd", MATLAB Data Structures
- ↑ Fudenberg, Tirole, 1983, punt 1.1.1
- ↑ Manning, 1999, Sectie 15.3.4.
- ↑ Ward, 1997, Ch.2.8.
- ↑ Zuber, 1980, Ch. 2
- ↑ Burgess, Moore, 2007, sectie 1.6.3. (SU (3)), paragraaf 2.4.3.2. (Kobayashi-Maskawa-matrix.
- ↑ Schiff, 1968, Ch 6
- ↑ Bohm, 2001, secties II.4 en II.8.
- ↑ Weinberg, 1995, Ch 3
- ↑ Guenther, 1990, Ch. 5.
- ↑ Van Heel, A.C.S.: Inleiding in de optica, Den Haag, 1964, pag. 192 e.v.
- ↑ Davidse, J.: Grondslagen van de eletronica, Utrecht, 1974; deel 1, pag. 207 e.v.

Wikibooks
Wikibooks heeft meer over dit onderwerp: Matrixrekening.










