Geometria differenziale delle curve
In matematica, la geometria differenziale delle curve usa l'analisi matematica per studiare le curve nel piano, nello spazio e più generalmente in uno spazio euclideo.
Definizioni
Definizioni di base
Una curva è una funzione continua , dove è un intervallo dei numeri reali. Se , con , si dice punto iniziale e punto finale, mentre la variabile in questo intervallo in genere si denota con la lettera e per la funzione si usa la notazione . Per sostegno di si intende l'immagine di tale funzione .


![{\displaystyle I=[a,b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d6214bb3ce7f00e496c0706edd1464ac60b73b5)







Si supponga che sia una funzione differenziabile sufficientemente regolare, ovvero una funzione che abbia derivate continue di un ordine sufficientemente alto; inoltre si chiede che la sua derivata prima sia un vettore mai nullo su tutto l'intervallo .


Lunghezza e parametrizzazione
Una riparametrizzazione di è un'altra curva tale che:


dove è una biiezione differenziabile con derivata sempre positiva (e quindi crescente) e è un intervallo dei reali che potrebbe coincidere con . In questo caso le curve e , benché descritte con parametrizzazioni diverse, sono intese come equivalenti.


La lunghezza di una curva definita su un intervallo chiuso è fornita da:

La lunghezza di una curva non cambia se essa viene riparametrizzata. Inoltre è possibile definire l'ascissa curvilinea come:

Esempio
Si consideri che l'intervallo di definizione della curva sia della forma e che un corpo puntiforme percorra la curva mentre la variabile tempo varia nell'intervallo temporale da 0 a ; si ha quindi un modello cinematico della curva. La lunghezza della curva percorsa dal corpuscolo dall'istante 0 all'istante è:
![{\displaystyle [0,T]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/35ccef2d3dc751e081375d51c111709d8a1d7ac6)



La funzione sempre crescente stabilisce una biiezione tra gli intervalli e e porta a una riparametrizzazione della curva. Scrivendo:

![{\displaystyle [0,L]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/53e3bfad6c2b8297e8c8d2e84ce8f869d69b0d86)

si ottiene la cosiddetta parametrizzazione secondo la lunghezza d'arco della curva. Questa parametrizzazione, in termini cinematici, si legge come il moto di un corpo puntiforme che percorre la curva con velocità costante uguale a :



Questa parametrizzazione della curva è l'unica che presenta la velocità costantemente uguale a . Benché sia spesso difficile da calcolare, essa è utile per dimostrare agevolmente alcuni teoremi.
Sistema di Frenet
Un sistema di Frenet è un sistema di riferimento mobile di vettori ortonormali dipendenti da , utili per descrivere il comportamento locale della curva in .


Si supponga che le derivate formino una base, e quindi siano linearmente indipendenti. In questo caso, il sistema di Frenet è definito a partire da questa base tramite il procedimento di ortonormalizzazione di Gram-Schmidt.

Le curvature generalizzate sono definite come:

Il sistema di Frenet e le curvature generalizzate non dipendono dalla parametrizzazione scelta.
2 dimensioni
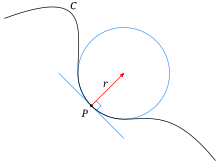
Nel piano, il primo vettore di Frenet è il versore tangente alla curva al valore del parametro, mentre il vettore , detto versore normale è il vettore normale a e punta verso il centro della circonferenza (ha la stessa direzione del raggio).




Il cerchio osculatore è il cerchio tangente a e di raggio . Il cerchio osculatore approssima la curva intorno al valore del parametro "fino al secondo ordine": ha cioè le stesse derivate prima e seconda di nel punto. La curvatura:


indica lo spostamento della curva dalla linea retta tangente. Il reciproco, corrispondente al raggio del cerchio osculatore in , è chiamato raggio di curvatura:

Ad esempio, una circonferenza di raggio ha curvatura costante , mentre una linea retta ha curvatura nulla.

3 dimensioni

Nello spazio tridimensionale, i vettori di Frenet prendono il nome di terna intrinseca, mentre le curvature generalizzate sono dette curvatura e torsione.

Versore tangente
Il versore tangente è il primo vettore di Frenet , che è definito come:


Pertanto sarà possibile riscrivere la derivata in funzione della lunghezza d'arco:

Se è parametrizzato secondo la lunghezza d'arco, questa assume valore unitario, perciò la relazione si riduce semplicemente a

Dalle relazioni precedenti si ricava un'ulteriore relazione tra il rapporto tra la lunghezza d'arco e il versore tangente, infatti:

Versore normale
Il versore normale è il secondo vettore di Frenet che misura quanto la curva differisce da una linea retta; è definito come:

Esiste una relazione che lega il versore normale alla lunghezza d'arco:

I versori tangente e normale generano un piano, chiamato piano osculatore della curva al punto .
Versore binormale
Il versore binormale è il terzo vettore di Frenet , che è ortogonale al piano osculatore, definito con il prodotto vettoriale semplicemente come:



Curvatura e torsione
La prima curvatura generalizzata è chiamata semplicemente curvatura di in , ed è data da


La seconda curvatura generalizzata è chiamata torsione e misura quanto la curva esce dal piano osculatore.


Il reciproco della curvatura nel punto è il raggio di curvatura ; inoltre una curva ha torsione nulla se e solo se è una curva piana.
![{\displaystyle \rho (t)=\left[k(t)\right]^{-1}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ffb40f1364a94c4ae28c8594899b91b63dfa037)
Formule di Frenet-Serret
Le formule di Frenet-Serret sono delle equazioni differenziali ordinarie del I ordine, la cui soluzione è il sistema di Frenet che descrive la curva. I coefficienti dell'equazione differenziale sono dati dalle curvature generalizzate .

2 dimensioni

3 dimensioni

n dimensioni (formula generale)

Proprietà delle curvature
Le curvature determinano la curva. Formalmente, date funzioni:
![{\displaystyle \chi _{i}\colon [a,b]\to \mathbb {R} ^{n},\ i=1,\ldots ,n}](https://wikimedia.org/api/rest_v1/media/math/render/svg/003c68e4b2d1824f35e0fcfb3a10406d3f06af39)
sufficientemente differenziabili, con:

esiste un'unica curva avente quelle curvature, a meno di traslazioni e altre isometrie dello spazio euclideo.
Descrizione attraverso aree e angoli
In geometria differenziale delle curve, la velocità angolare e la velocità areolare sono la velocità con cui il raggio vettore di un punto che si muove lungo una curva spazza, rispettivamente, un angolo e una superficie. I due vettori risultano paralleli e hanno lo stesso verso del vettore binormale.
Bibliografia
- (EN) Erwin Kreyszig, Differential Geometry, Dover Publications, New York, 1991, ISBN 0-486-66721-9. Chapter II is a classical treatment of Theory of Curves in 3-dimensions.
- E. Cesàro Lezioni di geometria intrinseca (1896)
Voci correlate
- Angolo tangente
- Curva
- Curvatura
- Geodetica
- Geometria descrittiva
- Geometria differenziale
- Problemi di misura
- Sistema di riferimento
- Triedro
- Vettore di Darboux
 Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica
Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica









